Тут все немножко сложнее. Для нормального поворота, оси вращения
всех колес должны пересечься в одной точке, причем перпендикуляр от
этой точки к оси автомобиля должен быть в задней части (передние
колеса должны поворачивать сильнее чем задние), еще должна быть
зависимость от скорости, чем выше скорость тем больше назад. Здесь
задача усложняется, база автомобиля переменная, и я так понял, эта
проблема решается за счет электроники причем самообучающейся.
Решение сомнительное, по
требованиям
безопасности должна быть прямое привод управляемых колес, вдруг машина заглохнет, а рулить надо.
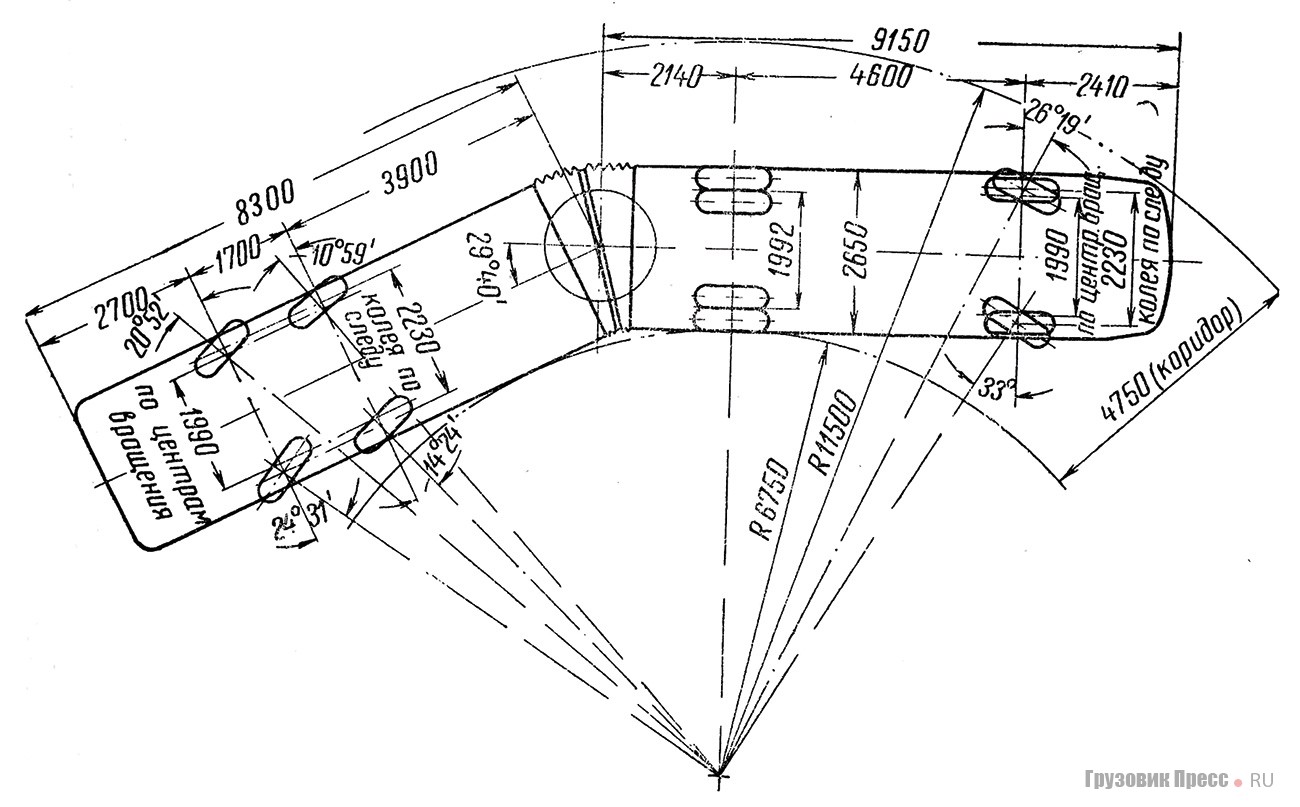
 IBAH (03.01.2025 18:34 - 18:40, просмотров: 261) ответил Aleksey_75 на у автобусов троллейбусов с соединением "гармошка" задние колеса всю
жизнь поворачивались, начиная с Экарусов
IBAH (03.01.2025 18:34 - 18:40, просмотров: 261) ответил Aleksey_75 на у автобусов троллейбусов с соединением "гармошка" задние колеса всю
жизнь поворачивались, начиная с Экарусов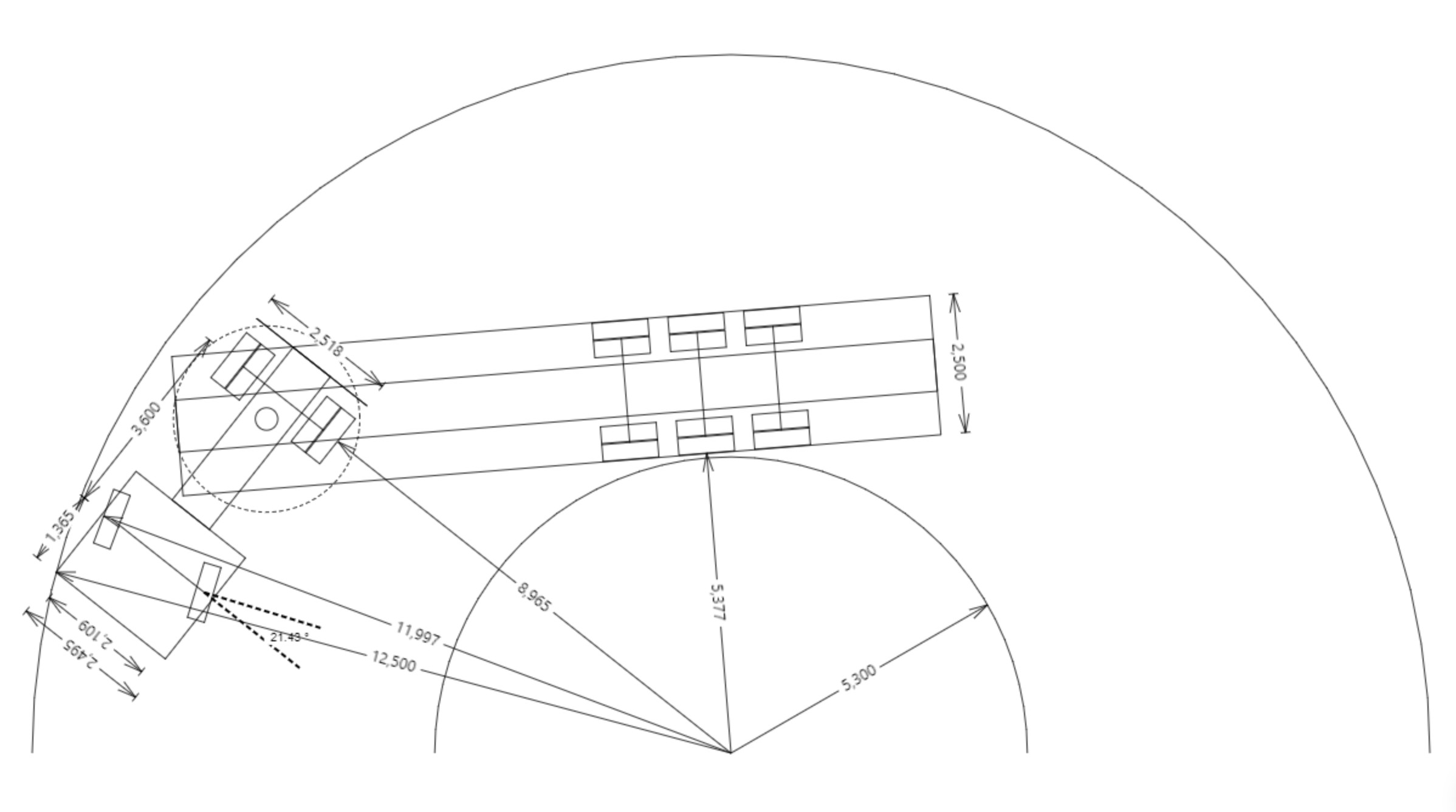{kind=link}
{kind=link}