 MBedder, терминатор (17.10.2018 11:32, просмотров: 310) ответил SciFi на Не нужен никакой "драйвер" для PHY. Подаёшь питание - и он работает.
MBedder, терминатор (17.10.2018 11:32, просмотров: 310) ответил SciFi на Не нужен никакой "драйвер" для PHY. Подаёшь питание - и он работает.-
- Спасибо - ценные замечания. Посмотрю схемотехнику. С ней не заладилось сразу. Снял ресет с PHY - сразу до вольта просело питание 3.3. Оказалось - LDO LM1117 кривой. Заменил - эта часть заработала.. - vesago(17.10.2018 11:52)
- Проверенная схема, на всякий случай. evgeniy1294(17.10.2018 18:23)
- Благодарю!! Сравню - может у меня что не так.. - vesago(17.10.2018 20:28)
- У меня наподобие. Только, что не подтянул кое-какие сигналы. Попробую сделать так-же. vesago(17.10.2018 20:40)
- До кучи, мое на KSZ8081MNX (MII) MBedder(17.10.2018 21:03)
- В коллекцию. Нужно было мне эту тему поднять до изготовления платы :) - vesago(17.10.2018 21:22)
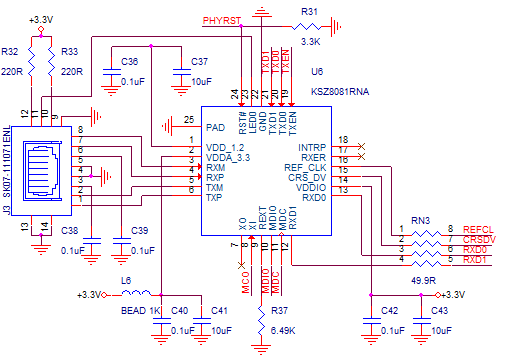
- И еще - изящное от SciFi как раз на KSZ8081RNA --> - MBedder(17.10.2018 21:31, ссылка, картинка)
- В коллекцию. Нужно было мне эту тему поднять до изготовления платы :) - vesago(17.10.2018 21:22)
- Резисторы 49,9 не нужны, их встроили в чип. Но не фурычит по причине софта, имхо. Подтяжки - фигня. Можете увидеть осциллографом приём кадров в сигналах RMII. Если в ответ нет отправки - косяки в софте. - SciFi(17.10.2018 20:58)
- Ну еще - компилятор. Шутка :) Софт конечно. Пока на 10 мегабитах и полудуплексе появляется линк. Если поставить 100 мегабит и полный дуплекс, линка нет. Завтра на работе придется из под стола достать ригол для начала. Посмотреть все ли так с vesago(119 знак., 17.10.2018 21:19)
- Линк - это когда PHY зажигает лампочку? Должен работать и на 10, и на 100. МК там не участвует совсем. Мог бы, конечно, предварительно подрихтовать регистры PHY, если подтяжки его увели не туда. Кстати, в порядки отладки надо прочитать все SciFi(77 знак., 17.10.2018 21:30 - 21:32)
- Хорошая мысль. Нужно попробовать. Вроде того. Линк - это когда сетка появляется в трэе. Тут еще мысль - я подключаю обычным пачкордом к ноуту. Может ему нужен перевернутый пачкорд? - vesago(17.10.2018 21:43)
- Ну если ты Auto MDI/MDIX не запретил в явном виде, то по барабану - MBedder(17.10.2018 21:46)
- Сравнил схемы с моей. У меня есть, вероятно, существенное отличие. Средние точки трансформаторов приема и передачи соединены и через один кондер на землю. Не удивлюсь, если данный штрих оказывает влияние на функционирование.. - vesago(18.10.2018 09:36 - 10:13)
- Ещё раз взглянул на схему. Соединить вместе RC и TC (средние точки) - это трэш и угар. Садитесь, два. SciFi(137 знак., 18.10.2018 10:08 - 10:27)
- Да, вот такие нынче инженеры пошли :) Исправил этот момент. Линк работает. Попробую запасную плату подключить. Может и поджарил :) - vesago(18.10.2018 10:17)
- О - этот сладкий миг :) Пошел пинг! Спасибо друзья - благодаря Вам, одолел я железяку :) По совету мудрых коллег, подтянул я как положено ноги микрелевской таракашки, поправил досадный косяк с общими точками транса. Также я брал за основу пример vesago(381 знак., 19.10.2018 12:13 - 12:23)
- Фигасе дырищи у этой платы. У нас обычно 0,3/0,7 мм. - SciFi(19.10.2018 12:31)
- Дырищи - скорее всего это я предусмотрел вывод незадействованных пинов процессора на дырки, которые в воздухе болтаются. Бывает нужно чего заколхозить. К примеру прикрутить ЖКИ или иное, что фантазия подскажет. - vesago(19.10.2018 13:09)
- Какой-то пьяный колхоз тогда получается - выводи лучше на гребенку/разъем какой-нибудь MBedder(19.10.2018 13:25)
- Разводка автоматическая? Я почему-то обычно расставляю плотно, там так не разугляешься. Перфекционизьм, едрить его налево. SciFi(19.10.2018 13:28 - 13:34)
- Какой-то пьяный колхоз тогда получается - выводи лучше на гребенку/разъем какой-нибудь MBedder(19.10.2018 13:25)
- Резонит даже 0.3/0.6 теперь разрешает без повышающего коэффициента - MBedder(19.10.2018 12:42)
- Дырищи - скорее всего это я предусмотрел вывод незадействованных пинов процессора на дырки, которые в воздухе болтаются. Бывает нужно чего заколхозить. К примеру прикрутить ЖКИ или иное, что фантазия подскажет. - vesago(19.10.2018 13:09)
- Фигасе дырищи у этой платы. У нас обычно 0,3/0,7 мм. - SciFi(19.10.2018 12:31)
- О - этот сладкий миг :) Пошел пинг! Спасибо друзья - благодаря Вам, одолел я железяку :) По совету мудрых коллег, подтянул я как положено ноги микрелевской таракашки, поправил досадный косяк с общими точками транса. Также я брал за основу пример vesago(381 знак., 19.10.2018 12:13 - 12:23)
- Да, вот такие нынче инженеры пошли :) Исправил этот момент. Линк работает. Попробую запасную плату подключить. Может и поджарил :) - vesago(18.10.2018 10:17)
- Ещё раз взглянул на схему. Соединить вместе RC и TC (средние точки) - это трэш и угар. Садитесь, два. SciFi(137 знак., 18.10.2018 10:08 - 10:27)
- У современных компов авто вот это вот должно иметь место быть в любом случае. Если трансформатор у RJ-45 неправильный, опыт показывает, что линк есть, но бывает существенная потеря кадров. - SciFi(17.10.2018 21:55)
- Сравнил схемы с моей. У меня есть, вероятно, существенное отличие. Средние точки трансформаторов приема и передачи соединены и через один кондер на землю. Не удивлюсь, если данный штрих оказывает влияние на функционирование.. - vesago(18.10.2018 09:36 - 10:13)
- Ну если ты Auto MDI/MDIX не запретил в явном виде, то по барабану - MBedder(17.10.2018 21:46)
- Хорошая мысль. Нужно попробовать. Вроде того. Линк - это когда сетка появляется в трэе. Тут еще мысль - я подключаю обычным пачкордом к ноуту. Может ему нужен перевернутый пачкорд? - vesago(17.10.2018 21:43)
- Это нормально, у меня так же. MAC использует 50МГц как тактовый сигнал, без него изменить содержимое его регистров невозможно. - evgeniy1294(17.10.2018 21:21)
- Линк - это когда PHY зажигает лампочку? Должен работать и на 10, и на 100. МК там не участвует совсем. Мог бы, конечно, предварительно подрихтовать регистры PHY, если подтяжки его увели не туда. Кстати, в порядки отладки надо прочитать все SciFi(77 знак., 17.10.2018 21:30 - 21:32)
- Ну еще - компилятор. Шутка :) Софт конечно. Пока на 10 мегабитах и полудуплексе появляется линк. Если поставить 100 мегабит и полный дуплекс, линка нет. Завтра на работе придется из под стола достать ригол для начала. Посмотреть все ли так с vesago(119 знак., 17.10.2018 21:19)
- MDIO подтягивать обязательно - evgeniy1294(17.10.2018 20:43)
- Подтянуто все-таки на другом листике :) vesago(17.10.2018 21:23)
- До кучи, мое на KSZ8081MNX (MII) MBedder(17.10.2018 21:03)
- Годная схема, моя одобряэ. Номиналы конденсаторов и L4 можно столь строго не блюсти, конечно. - SciFi(17.10.2018 20:33)
- Схема годная, но при чем там вотето: MBedder(573 знак., 17.10.2018 20:44)
- На полной схеме ниже идет драйвер CAN-шины. Программа для просмотра схем не позволяет их редактировать, даже коменты двигать(( - evgeniy1294(17.10.2018 20:48)
- Надо же, какая суворая - а если ей пиздюлей? :)) MBedder(17.10.2018 21:38)
- Лень же, а оправдание - как дырка в жопе, есть у всех) - evgeniy1294(17.10.2018 21:51)
- Ога, и Скрипалей тоже я :)) - MBedder(17.10.2018 21:44)
- часовню же - SciFi(17.10.2018 21:48)
- В четырнадцатом веке же, подзабыл уже :)) - MBedder(17.10.2018 21:56)
- часовню же - SciFi(17.10.2018 21:48)
шайтанрусский хакир! - SciFi(17.10.2018 21:39)
- Надо же, какая суворая - а если ей пиздюлей? :)) MBedder(17.10.2018 21:38)
- На полной схеме ниже идет драйвер CAN-шины. Программа для просмотра схем не позволяет их редактировать, даже коменты двигать(( - evgeniy1294(17.10.2018 20:48)
- Схема годная, но при чем там вотето: MBedder(573 знак., 17.10.2018 20:44)
- У меня наподобие. Только, что не подтянул кое-какие сигналы. Попробую сделать так-же. vesago(17.10.2018 20:40)
- Благодарю!! Сравню - может у меня что не так.. - vesago(17.10.2018 20:28)
- Проверенная схема, на всякий случай. evgeniy1294(17.10.2018 18:23)
- Спасибо - ценные замечания. Посмотрю схемотехнику. С ней не заладилось сразу. Снял ресет с PHY - сразу до вольта просело питание 3.3. Оказалось - LDO LM1117 кривой. Заменил - эта часть заработала.. - vesago(17.10.2018 11:52)
{kind=link}