 Make_Pic (01.10.2023 15:02, просмотров: 427) ответил stud23 на ПИД регулятор - вопросы:
Make_Pic (01.10.2023 15:02, просмотров: 427) ответил stud23 на ПИД регулятор - вопросы:-
- Все реальные системы апериодическое звено + задержка. Для
механические систем, люфтов нет - задержек нет. Упругих элементов
нет - апериодика первого порядка, за редким исключением. - IBAH(01.10.2023 21:22)
- Как это на СИ представить? Задержка - массив со считыванием i+n
элемента? - Make_Pic(01.10.2023 22:11)
- типа да. LordN(318 знак., 03.10.2023 08:32, картинка)
- Такие вещи обычно в матлаб/симулинк считают. Но можно и в спайсе. У Оркадовского PSPICE в библиотеке есть модели DC мотора, тахогенератора и ещё немного. АС мотора нет, но найти наверное можно или самостоятельно сделать не слишком сложную модель. ЫЫyкпy(33 знак., 02.10.2023 09:37, картинка)
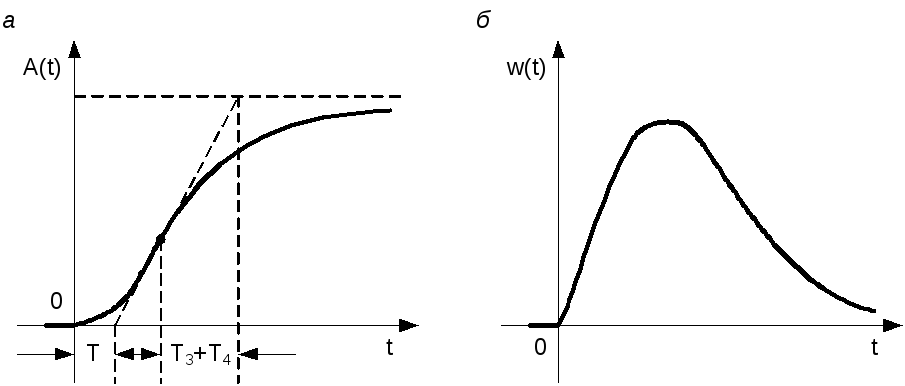
- В умных книжках пишут. Чтобы получить ответ системы надо сделать
свертку входного сигнала и весовой функции. Вот весовая функция
апериодического звена framer(21 знак., 02.10.2023 07:35, ссылка, картинка)
- Вот реалный пример как это сделать на Ц. framer(3708 знак., 03.10.2023 14:39, картинка, картинка)
- Апериодическое звено второго порядка уже содержит в себе все необходимое. Cкpипaч(221 знак., 01.10.2023 23:08)
- Ага. IBAH(183 знак., 01.10.2023 22:47)
- Как это на СИ представить? Задержка - массив со считыванием i+n
элемента? - Make_Pic(01.10.2023 22:11)
- Обычно используют апериодическое звено первого порядка. Если
"слишком просто" - второго, по ссылке тоже формула приведена, ближе
к концу. - Cкpипaч(1 знак., 01.10.2023 16:27, ссылка)
- +1. Масса или момент вращения плюс вязкое трение это и есть
апериодическое звено первого порядка. Если добавить пружину
получится второго порядка. В всякие вещи типа сухое трение, люфт,
задержка по времени делают дифуравнение нелинейным, а весь этот
матан с преобразованием Лапласа неприменимым. Но моделирование во
временнОй области всё ещё возможно. - ЫЫyкпy(01.10.2023 21:38)
- Вот с пружиной как будет выглядеть апериодическое звено - буровая
колонна при давлении на грунт сжимается, обладая коэффициентом
упругости (на моделях ее рисуют ка пружину), а при небольшом
подъеме колонны последняя начинает разжиматься и с задержкой
продолжать давить на грунт долотом. Как задержка добавляется к
апериодическому звену? - Make_Pic(01.10.2023 22:16)
- В такой простой модели задержки нет. Но если колонна длинная, то придется учитывать и скорость распространения по ней волны сжатия/растяжения (со скоростью звука). Но тогда и саму колонну одной пружинкой не описать. Тогда это можно представить длинной цепочкой из грузов и пружинок или обращаться с ней примерно как с длинной линией в электронике. ЫЫyкпy(275 знак., 01.10.2023 23:59)
- Внутри формулы уже все есть. Нарисуйте переходный процесс и попробуйте скормить автоугадалкам. Тут на днях кто-то из коллег давал ссылки. Cкpипaч(184 знак., 01.10.2023 23:29, картинка)
- Вот с пружиной как будет выглядеть апериодическое звено - буровая
колонна при давлении на грунт сжимается, обладая коэффициентом
упругости (на моделях ее рисуют ка пружину), а при небольшом
подъеме колонны последняя начинает разжиматься и с задержкой
продолжать давить на грунт долотом. Как задержка добавляется к
апериодическому звену? - Make_Pic(01.10.2023 22:16)
- +1. Масса или момент вращения плюс вязкое трение это и есть
апериодическое звено первого порядка. Если добавить пружину
получится второго порядка. В всякие вещи типа сухое трение, люфт,
задержка по времени делают дифуравнение нелинейным, а весь этот
матан с преобразованием Лапласа неприменимым. Но моделирование во
временнОй области всё ещё возможно. - ЫЫyкпy(01.10.2023 21:38)
- Думаете универсальные есть? Как то ФАП таймером проца делал,
странно вышло, если с захватом (capture), то стабильно, если после
окончания цикла перезагрузка - ботлтанка. - Visitor(01.10.2023 15:34)
- Да бог с ними с универсальными, хоть какая то модель объекта
(желательно с асинхронным двигателем + моментом инерции) чтобы
проверить без железа - Make_Pic(01.10.2023 15:58)
- Второй закон Ньютона? ЫЫyкпy(393 знак., 01.10.2023 18:44, ссылка)
- Если надо векторное управление асинхронным двигателем то там
похитрей система управления. Одним ПИД не обойтись. - framer(1 знак., 01.10.2023 16:36, ссылка)
- Уточню, драйвер движка имеется ЧП вход 0-10В в итоге вращение
двигателя, но к двигателю подключен объект управления с
определенным моментом инерции, с объекта снимаем частоту с
энкодера. Я уже ниже поднимал подобную тему, здесь спрашиваю
"отфонарную" формулу модели только для проверки. - Make_Pic(01.10.2023 17:04)
- Не известно, что собой представляет то, что рулит двигателем. Если вся проблема в инерциальности то возможны два варианта. Как вспомнил Скрипач это может быть апериодическое звено либо первого либо второго порядка. Апериодическое звено первого порядка будет похоже на двигатель постоянного тока. Можно проверить. Подать ступенчатый сигнал (скажем 5В) и снять переходную характеристику. Если будет похоже на это(мало вроятно) то можно подобрать коэффициенты . framer(671 знак., 01.10.2023 20:55, картинка, картинка)
- Ну если процесс намного медленней электромагниных постоянных
двигателя, да еще тормозной резистор есть, можно и одним ПИДом
обойтись. Предполагается, что внутренними контурами скорости и тока
рулит сам частотник, если он векторный и правильно настроен. - Yurasvs(01.10.2023 17:03)
- частотник рулит движком, но далее целая инерционная система, на выходе энкодер. - Make_Pic(01.10.2023 17:06)
- Уточню, драйвер движка имеется ЧП вход 0-10В в итоге вращение
двигателя, но к двигателю подключен объект управления с
определенным моментом инерции, с объекта снимаем частоту с
энкодера. Я уже ниже поднимал подобную тему, здесь спрашиваю
"отфонарную" формулу модели только для проверки. - Make_Pic(01.10.2023 17:04)
- Т.е. на входе 0 - 10В а на выходе реакция объекта - частота с энкодера - Make_Pic(01.10.2023 16:00)
- Да бог с ними с универсальными, хоть какая то модель объекта
(желательно с асинхронным двигателем + моментом инерции) чтобы
проверить без железа - Make_Pic(01.10.2023 15:58)
- Все реальные системы апериодическое звено + задержка. Для
механические систем, люфтов нет - задержек нет. Упругих элементов
нет - апериодика первого порядка, за редким исключением. - IBAH(01.10.2023 21:22)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}