Связанные сообщения
- ПИД. Давно хочу обсудить.2010-10-24
 stud23 (28.09.2023 12:24, просмотров: 54757)
stud23 (28.09.2023 12:24, просмотров: 54757)-
- Делали мы тут сушилку для дерева. Наебались с этими вашими ПИДами
по самые этисамые. Книги и видосики можно не смотреть. Только
руками, глазами и через серрдце в мозг)) - Tpoeшник(04.10.2023 20:27)
- Поверь, когда идет вал, три-четыре регулятора в день настраиваешь,
открывается "второе дыхание" :) Cкpипaч(360 знак., 05.10.2023 09:00)
- Сорян - не верю. - Tpoeшник(05.10.2023 23:53)
- Могу лишь пожать плечами. На моей практике, большинство косяков с
ПИД лечится исправлением косяков с местом установки датчика,
проводкой, дохлыми блоками питания. Cкpипaч(226 знак., 06.10.2023 08:20)
- ..можно ещё инструкцию к дивайсу почитать. Tyмблep(10 знак., 07.10.2023 18:24, ссылка)
- Надо было собирать коллекцию. Интересно, сколько я разных типов регуляторов уже в руках подержал? От 100 до 500? - Cкpипaч(09.10.2023 14:05)
- ..можно ещё инструкцию к дивайсу почитать. Tyмблep(10 знак., 07.10.2023 18:24, ссылка)
- Могу лишь пожать плечами. На моей практике, большинство косяков с
ПИД лечится исправлением косяков с местом установки датчика,
проводкой, дохлыми блоками питания. Cкpипaч(226 знак., 06.10.2023 08:20)
- >>>>Требует мозгов пересчет из Хр и Ти в те
числовые значения, что нужны в формуле данного конкретного
устройства, но это делается только один раз. Make_Pic(143 знак., 05.10.2023 13:43)
- А хрен его знает! :-D Cкpипaч(439 знак., 05.10.2023 14:04)
- Те ни ЛАЧХ, ни частота среза, ни запас по фазе Tyмблep(166 знак., 05.10.2023 19:27)
- Если анализировать ЛАЧХ по каждому фанкойлу и радиатору у
заказчика, можно уйти на пенсию раньше чем закончить проект :))) Cкpипaч(136 знак., 05.10.2023 19:31)
- Ага, как то раз мне предложили реализовать ПИД алгоритм. Tyмблep(136 знак., 05.10.2023 19:37)
- А Кп = 0 не видел? Я видел. - Cкpипaч(05.10.2023 19:42)
- Физический смысл этого значения - "регулятор тут не нужен". - Tyмблep(05.10.2023 20:10)
- В том случае, был чистый И-регулятор. Попытка
замести под шкафчто-то сделать со странными периодически бросками датчика туда-сюда. Cкpипaч(82 знак., 05.10.2023 21:17)
- В том случае, был чистый И-регулятор. Попытка
- Физический смысл этого значения - "регулятор тут не нужен". - Tyмблep(05.10.2023 20:10)
- А Кп = 0 не видел? Я видел. - Cкpипaч(05.10.2023 19:42)
- Ага, как то раз мне предложили реализовать ПИД алгоритм. Tyмблep(136 знак., 05.10.2023 19:37)
- Если анализировать ЛАЧХ по каждому фанкойлу и радиатору у
заказчика, можно уйти на пенсию раньше чем закончить проект :))) Cкpипaч(136 знак., 05.10.2023 19:31)
- Те ни ЛАЧХ, ни частота среза, ни запас по фазе Tyмблep(166 знак., 05.10.2023 19:27)
- А хрен его знает! :-D Cкpипaч(439 знак., 05.10.2023 14:04)
- Сорян - не верю. - Tpoeшник(05.10.2023 23:53)
- +1 :) Только руками, глазами. - framer(1 знак., 04.10.2023 21:12, youtube)
- Это положительная обратная связь. Tyмблep(130 знак., 05.10.2023 20:09)
- :) скорей всего подойдет модель обратного маятника. Надо было не веревку а палку :) - framer(05.10.2023 20:11)
- +2 ;) - Cкpипaч(04.10.2023 21:56)
- Это положительная обратная связь. Tyмблep(130 знак., 05.10.2023 20:09)
- Поверь, когда идет вал, три-четыре регулятора в день настраиваешь,
открывается "второе дыхание" :) Cкpипaч(360 знак., 05.10.2023 09:00)
- Порекомендую одну книгу, "Гродинз Ф. Теория регулирования и биологические системы. 1962". На полноценный учебник по ТАУ она не тянет, но основы изложены хорошо. ЫЫyкпy(82 знак., 03.10.2023 12:40)
- To LordN -> - Make_Pic(1 знак., 03.10.2023 07:25, ссылка)
- 1. Это принципиальная особенность пропорционального регулирования,
для уменьшения ошибки следует увеличивать коэффициент. Раз это не
нагуглили/не поняли, то остальное бессмысленно. - VLLV(02.10.2023 09:54)
- Статическая ошибка уменьшится, но принципиально останется. Убирает ошибку интегральный компонент. - _volkanaft_(03.10.2023 08:41)
- Подскажите pls формулу модели объекта регулирования, любой, главное
проверить PID регулятор с учетом инерции реакции объекта
регулирования? - Make_Pic(01.10.2023 15:02)
- Все реальные системы апериодическое звено + задержка. Для
механические систем, люфтов нет - задержек нет. Упругих элементов
нет - апериодика первого порядка, за редким исключением. - IBAH(01.10.2023 21:22)
- Как это на СИ представить? Задержка - массив со считыванием i+n
элемента? - Make_Pic(01.10.2023 22:11)
- типа да. LordN(318 знак., 03.10.2023 08:32, картинка)
- Такие вещи обычно в матлаб/симулинк считают. Но можно и в спайсе. У Оркадовского PSPICE в библиотеке есть модели DC мотора, тахогенератора и ещё немного. АС мотора нет, но найти наверное можно или самостоятельно сделать не слишком сложную модель. ЫЫyкпy(33 знак., 02.10.2023 09:37, картинка)
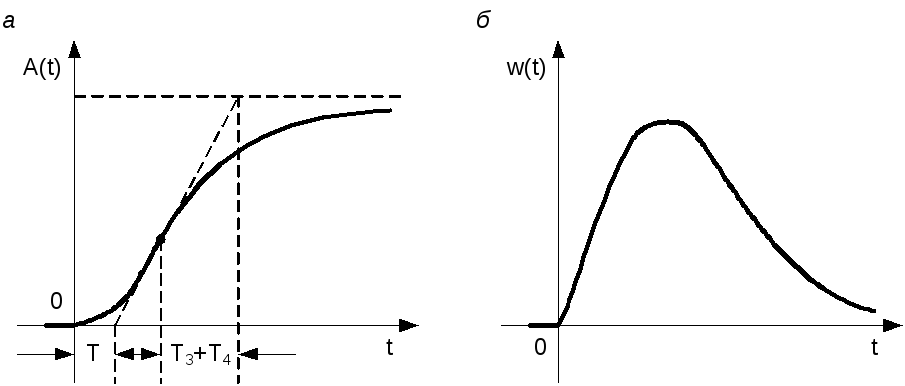
- В умных книжках пишут. Чтобы получить ответ системы надо сделать
свертку входного сигнала и весовой функции. Вот весовая функция
апериодического звена framer(21 знак., 02.10.2023 07:35, ссылка, картинка)
- Вот реалный пример как это сделать на Ц. framer(3708 знак., 03.10.2023 14:39, картинка, картинка)
- Апериодическое звено второго порядка уже содержит в себе все необходимое. Cкpипaч(221 знак., 01.10.2023 23:08)
- Ага. IBAH(183 знак., 01.10.2023 22:47)
- Как это на СИ представить? Задержка - массив со считыванием i+n
элемента? - Make_Pic(01.10.2023 22:11)
- Обычно используют апериодическое звено первого порядка. Если
"слишком просто" - второго, по ссылке тоже формула приведена, ближе
к концу. - Cкpипaч(1 знак., 01.10.2023 16:27, ссылка)
- +1. Масса или момент вращения плюс вязкое трение это и есть
апериодическое звено первого порядка. Если добавить пружину
получится второго порядка. В всякие вещи типа сухое трение, люфт,
задержка по времени делают дифуравнение нелинейным, а весь этот
матан с преобразованием Лапласа неприменимым. Но моделирование во
временнОй области всё ещё возможно. - ЫЫyкпy(01.10.2023 21:38)
- Вот с пружиной как будет выглядеть апериодическое звено - буровая
колонна при давлении на грунт сжимается, обладая коэффициентом
упругости (на моделях ее рисуют ка пружину), а при небольшом
подъеме колонны последняя начинает разжиматься и с задержкой
продолжать давить на грунт долотом. Как задержка добавляется к
апериодическому звену? - Make_Pic(01.10.2023 22:16)
- В такой простой модели задержки нет. Но если колонна длинная, то придется учитывать и скорость распространения по ней волны сжатия/растяжения (со скоростью звука). Но тогда и саму колонну одной пружинкой не описать. Тогда это можно представить длинной цепочкой из грузов и пружинок или обращаться с ней примерно как с длинной линией в электронике. ЫЫyкпy(275 знак., 01.10.2023 23:59)
- Внутри формулы уже все есть. Нарисуйте переходный процесс и попробуйте скормить автоугадалкам. Тут на днях кто-то из коллег давал ссылки. Cкpипaч(184 знак., 01.10.2023 23:29, картинка)
- Вот с пружиной как будет выглядеть апериодическое звено - буровая
колонна при давлении на грунт сжимается, обладая коэффициентом
упругости (на моделях ее рисуют ка пружину), а при небольшом
подъеме колонны последняя начинает разжиматься и с задержкой
продолжать давить на грунт долотом. Как задержка добавляется к
апериодическому звену? - Make_Pic(01.10.2023 22:16)
- +1. Масса или момент вращения плюс вязкое трение это и есть
апериодическое звено первого порядка. Если добавить пружину
получится второго порядка. В всякие вещи типа сухое трение, люфт,
задержка по времени делают дифуравнение нелинейным, а весь этот
матан с преобразованием Лапласа неприменимым. Но моделирование во
временнОй области всё ещё возможно. - ЫЫyкпy(01.10.2023 21:38)
- Думаете универсальные есть? Как то ФАП таймером проца делал,
странно вышло, если с захватом (capture), то стабильно, если после
окончания цикла перезагрузка - ботлтанка. - Visitor(01.10.2023 15:34)
- Да бог с ними с универсальными, хоть какая то модель объекта
(желательно с асинхронным двигателем + моментом инерции) чтобы
проверить без железа - Make_Pic(01.10.2023 15:58)
- Второй закон Ньютона? ЫЫyкпy(393 знак., 01.10.2023 18:44, ссылка)
- Если надо векторное управление асинхронным двигателем то там
похитрей система управления. Одним ПИД не обойтись. - framer(1 знак., 01.10.2023 16:36, ссылка)
- Уточню, драйвер движка имеется ЧП вход 0-10В в итоге вращение
двигателя, но к двигателю подключен объект управления с
определенным моментом инерции, с объекта снимаем частоту с
энкодера. Я уже ниже поднимал подобную тему, здесь спрашиваю
"отфонарную" формулу модели только для проверки. - Make_Pic(01.10.2023 17:04)
- Не известно, что собой представляет то, что рулит двигателем. Если вся проблема в инерциальности то возможны два варианта. Как вспомнил Скрипач это может быть апериодическое звено либо первого либо второго порядка. Апериодическое звено первого порядка будет похоже на двигатель постоянного тока. Можно проверить. Подать ступенчатый сигнал (скажем 5В) и снять переходную характеристику. Если будет похоже на это(мало вроятно) то можно подобрать коэффициенты . framer(671 знак., 01.10.2023 20:55, картинка, картинка)
- Ну если процесс намного медленней электромагниных постоянных
двигателя, да еще тормозной резистор есть, можно и одним ПИДом
обойтись. Предполагается, что внутренними контурами скорости и тока
рулит сам частотник, если он векторный и правильно настроен. - Yurasvs(01.10.2023 17:03)
- частотник рулит движком, но далее целая инерционная система, на выходе энкодер. - Make_Pic(01.10.2023 17:06)
- Уточню, драйвер движка имеется ЧП вход 0-10В в итоге вращение
двигателя, но к двигателю подключен объект управления с
определенным моментом инерции, с объекта снимаем частоту с
энкодера. Я уже ниже поднимал подобную тему, здесь спрашиваю
"отфонарную" формулу модели только для проверки. - Make_Pic(01.10.2023 17:04)
- Т.е. на входе 0 - 10В а на выходе реакция объекта - частота с энкодера - Make_Pic(01.10.2023 16:00)
- Да бог с ними с универсальными, хоть какая то модель объекта
(желательно с асинхронным двигателем + моментом инерции) чтобы
проверить без железа - Make_Pic(01.10.2023 15:58)
- Все реальные системы апериодическое звено + задержка. Для
механические систем, люфтов нет - задержек нет. Упругих элементов
нет - апериодика первого порядка, за редким исключением. - IBAH(01.10.2023 21:22)
- Объясните пожалуйста, почему остаются небольшие колебания процесса
регулирования PID и значение текущей скорости очень медленно
стремится к целевой? - stud24(29.09.2023 09:32,
 )General
)General
- Время.. Чем больше время интегрирования, тем медленней. Чем короче время - тем быстрее.. Но необходимо следить и за усилением и не рвать! - Solo(29.09.2023 19:57)
- это хорошо что не большие, могли бы и загенерить от края до края. Nikolay801_(40 знак., 29.09.2023 11:27, картинка, картинка)
- Методика подбора коэффициентов? Циглер? Кун? Что-то "авторское"? :) - Cкpипaч(1 знак., 29.09.2023 10:44, ссылка)
- колебания из-за задержек обратной связи, можно увеличить D - General(29.09.2023 10:09)
- Надо P увеличить попробовать. - Eddy_Em(29.09.2023 09:48)
- Плавно увеличиваем P, начиная с минимума, I на минимуме, D выключен. Как только начинает на низкой частоте генерить с большой амплитудой и фазовой ошибкой, увеличиваем I пока не успокоется. При достижении необходимой скорости реакции между входом и выходом начинаем играться с D и смотрим переходной процесс при реакции на единичный импульс или меандр на входе. Ищем компромис между задержкой по времени и перерегулированием по амплитуде. Регулятор при переходе входа через БAPMAЛEЙ(32 знак., 29.09.2023 11:59)
- Телепаты палятся! :-D - Cкpипaч(29.09.2023 10:28)
- Картинку не могу приатачить - stud24(29.09.2023 12:05, )
- Я выше дал ссылку на стандартные методики подбора. - Cкpипaч(29.09.2023 12:11)
- Картинку не могу приатачить - stud24(29.09.2023 12:05,
- 4) безударное переключение ручной-автомат - ucMike(28.09.2023 18:41)
- Силюсь понять, что такое ручной ПИД? - IBAH(29.09.2023 21:14)
- Переключение выхода регулятора на ручное управление и возврат обратно. - Cкpипaч(29.09.2023 21:26)
- -> - framer(1 знак., 29.09.2023 21:17, youtube)
- понятнее не стало... - IBAH(29.09.2023 21:25)
- Вот тут предлагают какой-то вариант (->) - Cкpипaч(1 знак., 28.09.2023 19:16, ссылка)
- оттуда же ссылка на он лайн симулятор - Alex68(1 знак., 28.09.2023 20:45, ссылка)
- На третьем уровне сложности так и не смог полностью подавить
колебания, хотя их амплитуда небольшая осталась. Видимо, это
невозможно ... - Yurasvs(29.09.2023 18:33)
- Может быть какая-то модель, далекая от "тепловых процессов", но
параметры какие-то странные. Во всех трех случаях, почти ноль (а
лучше тупо ноль) И. Зато довольно большая Д. - Cкpипaч(29.09.2023 20:46)
- У каждого свои единицы измерения, это ни на что не влияет. Вроде как если время реакции всей петли существенно медленнее объекта, ПИДом успокоить вообще невозможно. - Yurasvs(30.09.2023 07:53)
- Довольно большая D - значит, сигнал о текущем положении без шума - модель. - Nikolay_Po(29.09.2023 21:02)
- Может быть какая-то модель, далекая от "тепловых процессов", но
параметры какие-то странные. Во всех трех случаях, почти ноль (а
лучше тупо ноль) И. Зато довольно большая Д. - Cкpипaч(29.09.2023 20:46)
- На третьем уровне сложности так и не смог полностью подавить
колебания, хотя их амплитуда небольшая осталась. Видимо, это
невозможно ... - Yurasvs(29.09.2023 18:33)
- Спасибо за ссылку, почитаю на ночь. Для ПИД
Y=Кп(Х-Хо)+Ки*Sинтегральное+Кд*Дифф : вручную примерно ставиться
нужный Y. При переключении на автомат считаем Разница=Y-Кп(Х-Хо) .
Затем считаем Sинтегральное=Разница / Ки. Диффчасть при
переключении = 0 - ucMike(28.09.2023 19:56)
- Сомнительно. Tyмблep(442 знак., 29.09.2023 02:46)
- По ссылке, предлагают загнать текущий Y в Sинтегр. и Хо = Х. - Cкpипaч(28.09.2023 20:05)
- Ручками Xo=X добиться можно, если тремор ручонок не мешает. Тогда
Y= 0 + Ки*Sинтегр+Диф. - ucMike(28.09.2023 20:13)
- Y= 0 + Ки*Sинтегр+0. Предполагая (или назначив) что Y =Y0 - Cкpипaч(28.09.2023 20:22)
- Yo вроде в ПИ нет, есть в П-регуляторе - ucMike(28.09.2023 21:44)
- Есть разные реализации. - Cкpипaч(28.09.2023 21:56)
- Yo вроде в ПИ нет, есть в П-регуляторе - ucMike(28.09.2023 21:44)
- Y= 0 + Ки*Sинтегр+0. Предполагая (или назначив) что Y =Y0 - Cкpипaч(28.09.2023 20:22)
- Ручками Xo=X добиться можно, если тремор ручонок не мешает. Тогда
Y= 0 + Ки*Sинтегр+Диф. - ucMike(28.09.2023 20:13)
- оттуда же ссылка на он лайн симулятор - Alex68(1 знак., 28.09.2023 20:45, ссылка)
- Не делал нигде. Но где-то видел реализацию в FBD с двумя иконками PID. - Cкpипaч(28.09.2023 18:49)
- Силюсь понять, что такое ручной ПИД? - IBAH(29.09.2023 21:14)
- мне, как двоечнику, зашло чтиво отсюда Sergei_sR(21 знак., 28.09.2023 15:46, ссылка)
- ну хуйня жешь никчемушная, рази что только для затравки годится. LordN(35 знак., 28.09.2023 18:28)
- ...это и есть "в интернете" :) - Cкpипaч(28.09.2023 18:31)
- Спасибо. Классно. - Eddy_Em(28.09.2023 16:17)
- Как старому другу.... - Cкpипaч(1 знак., 28.09.2023 16:50, ссылка)
- когда я слышу словосочетание "разностный пид" мне всегда хочется
блевать LordN(95 знак., 28.09.2023 18:31)
- Я смотрю вы ПИД регуляторах разбираетесь как практик - тогда какой
вариант из массы реализаций лучше использовать желательно с
примером кода? - Make_Pic(03.10.2023 07:17)
- А можно и мне? ПИД не такая сложная штука, чтобы брать чужие
исходники, всего семь арифметических операций. В практической
реализации надо добавить: IBAH(643 знак., 03.10.2023 15:10)
- Как бэ много наперечислял, покажется. Но ни пункта просто так не обосрёшь... :) А лишь добавишь перечень. Лет шесть развлекался с нагревательными, но совершенства оптимизации так и не достиг в объектах с переменной транспортной задержкой. Шеф, благо, позволял развлекаться. Однако, когда я пришел к ветвлению нечеткой логики с адаптивным регулятором в каждой ветви, мне самому стало страшно - бросил, и даже уволился.... А так-то забавная игрушка! - bnb62(04.10.2023 17:11)
- я уже пару лет собираюсь нарисовать блок схему, но все руки не
доходят. LordN(1098 знак., 03.10.2023 08:26, ссылка, ссылка)
- Спасибо. - Make_Pic(03.10.2023 08:59)
- А можно и мне? ПИД не такая сложная штука, чтобы брать чужие
исходники, всего семь арифметических операций. В практической
реализации надо добавить: IBAH(643 знак., 03.10.2023 15:10)
- Знаю как минимум два достаточно успешных ПЛК, с вполне приличными
разностными ПИД. А так - атом неисчерпаем, как и ПИД. Накидай своих
"секретиков" :) - Cкpипaч(1 знак., 28.09.2023 18:35 - 18:43, ссылка)
- разностный - это не пид. это ограниченный вариант пидоподобного
регулятора, в котором нельзя отключить П И или Д по своему желанию. LordN(140 знак., 28.09.2023 18:38)
- Переход от одной формы представления к другой производится
простейшими алгебраическими преобразованиями. Эквивалентными, по
определению. - Cкpипaч(28.09.2023 18:43)
- ну давай, изобрази разностный П-регулятор LordN(3 знак., 03.10.2023 12:06)
- Вот такая формула лежит в Википедии. Сам я использую "неразборный"
FBD-блок, от разработчиков ПЛК. Cкpипaч(746 знак., 03.10.2023 18:55, картинка)
- а теперь, ки=0, кд=0, и на каком-то этапе ошибка тоже = 0. выход
при этом нулю не равен. что произойдёт дальше? правильно, ничего.
выход зависнет каком-то положении. о чем это говорит? о том, что
это просто какая-то формулка которая как-то считает и быть может её
можно пристроить в качестве регулятора на какой-то объект, то вот
П-регулятором она быть не может LordN(144 знак., 04.10.2023 06:40)
- в шнайдере если Ki=0 то пид-регулятор переключается самостоятельно
на формулу Y=50%+Kp*(X-Xo) - ucMike(04.10.2023 17:49)
- Ты забыл дописать "за каким-то хуем". Cкpипaч(136 знак., 04.10.2023 21:59)
- потому что в этом регуляторе нет параметра Yo. Не нравится встроенный - пиши свой регулятор - ucMike(05.10.2023 11:36)
- Ты забыл дописать "за каким-то хуем". Cкpипaч(136 знак., 04.10.2023 21:59)
- Не понял, если при ненулевом выходе, ошибка ноль, то так держать!
Нормально. Если КП не ноль, то при появлении ошибки, выход
изменится в нужную сторону, хотя и не полностью устранит ошибку. Nikolay_Po(71 знак., 04.10.2023 10:01)
- теперь я не понял. ПИ регулятор выставляет регулятору мощности
грелки какую-то величину и ошибка при этом уходит в нуль. и там
болтается. если использую мертвую зону - то вапще нуль. LordN(248 знак., 04.10.2023 11:30)
- Погодите! Как же выход должен быть равен нулю, когда горелке нужно
продолжать давать мощность? В установившемся режиме, с
пропорциональным регулятором, на выходе, в зависимости от
потребностей объекта, может быть постоянное ненулевое значение, и
это нормально. Например, объект требует отопления, наружная
температура ниже требуемой внутренней. Регулятор должен указывать
горелке отопления выдавать требуемую мощность для компенсации
потерь. Nikolay_Po(563 знак., 04.10.2023 11:59)
- П регулятор это выход = ошибка * коэффициент. LordN(148 знак., 04.10.2023 14:42)
- Спасибо. Упустил из виду. Напомнили, что при абсолютном нуле ошибки
на входе, на выходе будет тоже ноль. Уточняю свою позицию:
подразумевал достаточно большое значение пропорционального
коэффициента, при котором пренебрежимо малая ошибка на входе даст
достаточный, для удержания ошибки в допустимых пределах,
управляющий сигнал на выходе. В противном случае, только лишь
П-регулятор нельзя использовать. - Nikolay_Po(04.10.2023 14:58)
- большое усиление в реальных тепловых системах почти невозможно, из-за транспортных задержек начинается возбуд LordN(439 знак., 04.10.2023 19:11)
- Спасибо. Упустил из виду. Напомнили, что при абсолютном нуле ошибки
на входе, на выходе будет тоже ноль. Уточняю свою позицию:
подразумевал достаточно большое значение пропорционального
коэффициента, при котором пренебрежимо малая ошибка на входе даст
достаточный, для удержания ошибки в допустимых пределах,
управляющий сигнал на выходе. В противном случае, только лишь
П-регулятор нельзя использовать. - Nikolay_Po(04.10.2023 14:58)
- П регулятор это выход = ошибка * коэффициент. LordN(148 знак., 04.10.2023 14:42)
- Погодите! Как же выход должен быть равен нулю, когда горелке нужно
продолжать давать мощность? В установившемся режиме, с
пропорциональным регулятором, на выходе, в зависимости от
потребностей объекта, может быть постоянное ненулевое значение, и
это нормально. Например, объект требует отопления, наружная
температура ниже требуемой внутренней. Регулятор должен указывать
горелке отопления выдавать требуемую мощность для компенсации
потерь. Nikolay_Po(563 знак., 04.10.2023 11:59)
- теперь я не понял. ПИ регулятор выставляет регулятору мощности
грелки какую-то величину и ошибка при этом уходит в нуль. и там
болтается. если использую мертвую зону - то вапще нуль. LordN(248 знак., 04.10.2023 11:30)
- Разве это не нормальный случай при отсутствии И-компоненты? - maik-vs(04.10.2023 09:52)
- это было первое. и второе. иногда очень полезно посмотреть на то,
как ведут отдельные слагаемые регулятора. П, И, Д. из этой формулки
ты их никак не вытащишь - LordN(04.10.2023 08:11)
- Убедил, отличия в поведении - найти можно. Отныне переименовываю разностный ПИД в "регулятор N-Лорда" :) Cкpипaч(615 знак., 04.10.2023 13:53)
- в шнайдере если Ki=0 то пид-регулятор переключается самостоятельно
на формулу Y=50%+Kp*(X-Xo) - ucMike(04.10.2023 17:49)
- а теперь, ки=0, кд=0, и на каком-то этапе ошибка тоже = 0. выход
при этом нулю не равен. что произойдёт дальше? правильно, ничего.
выход зависнет каком-то положении. о чем это говорит? о том, что
это просто какая-то формулка которая как-то считает и быть может её
можно пристроить в качестве регулятора на какой-то объект, то вот
П-регулятором она быть не может LordN(144 знак., 04.10.2023 06:40)
- Вот такая формула лежит в Википедии. Сам я использую "неразборный"
FBD-блок, от разработчиков ПЛК. Cкpипaч(746 знак., 03.10.2023 18:55, картинка)
- нуну, эквивалентность в частотной и временной областях далеко не всегда тождественны. LordN(117 знак., 28.09.2023 18:53)
- ну давай, изобрази разностный П-регулятор LordN(3 знак., 03.10.2023 12:06)
- Переход от одной формы представления к другой производится
простейшими алгебраическими преобразованиями. Эквивалентными, по
определению. - Cкpипaч(28.09.2023 18:43)
- "Разностный"? Eddy_Em(21 знак., 28.09.2023 18:37)
- Почитай статью, по ссылке "другу". - Cкpипaч(28.09.2023 18:37)
- Если на лету менять уставку, нужно и параметры немножко изменять.
Как раз, когда на работе был, наткнулся на хорошую статью (осталось
на рабочем компе - ссыль не дам пока), где на примере сишного кода
в то ли 8, то ли 10 этапов автор рассматривает всякие косяки (в
т.ч. и изменение уставки), в конце-концов приводя код, который все
эти штуки нивелирует. - Eddy_Em(28.09.2023 18:40)
- Ссылка. Но практике, лучше работает пропустить уставку через БИХ-фильтр, чем грязными руками внутрь формулы лезть. - Cкpипaч(1 знак., 28.09.2023 18:46, ссылка)
- Если на лету менять уставку, нужно и параметры немножко изменять.
Как раз, когда на работе был, наткнулся на хорошую статью (осталось
на рабочем компе - ссыль не дам пока), где на примере сишного кода
в то ли 8, то ли 10 этапов автор рассматривает всякие косяки (в
т.ч. и изменение уставки), в конце-концов приводя код, который все
эти штуки нивелирует. - Eddy_Em(28.09.2023 18:40)
- Почитай статью, по ссылке "другу". - Cкpипaч(28.09.2023 18:37)
- разностный - это не пид. это ограниченный вариант пидоподобного
регулятора, в котором нельзя отключить П И или Д по своему желанию. LordN(140 знак., 28.09.2023 18:38)
- Я смотрю вы ПИД регуляторах разбираетесь как практик - тогда какой
вариант из массы реализаций лучше использовать желательно с
примером кода? - Make_Pic(03.10.2023 07:17)
- Спасибо, почитаю. Eddy_Em(728 знак., 28.09.2023 17:04, ссылка)
- А просто брать упреждение БИХ-фильтром, разве не достаточно? - Cкpипaч(28.09.2023 17:08)
- Да кто его знает. Хочу плавно (без рывков, как при трапециевидном
рампе) разгонять и тормозить двигатель. Eddy_Em(580 знак., 28.09.2023 17:17)
- Плавный разгон и торможение - это задача планировщика, а ПИД в приводе только отрабатывает то, что выдаст интерполятор(в случае многоосевого движения) который стоит после планировщика. Если хочется очень плавно, то нужно учитывать(ограничивать) рывок(jerk), который производная ускорения. Ещё есть такая штука в ЧПУ, как lookahead который используется для планирования движения по сложной составной траектории с ограничением по заданной точности и возможностям механики. БAPMAЛEЙ(27 знак., 28.09.2023 23:46, ссылка, ссылка)
- Чем-то похоже на задачу дозирования. Там мы параметром настройки
переходили от дозирования по весу к дозированию по времени. Ну и,
понятно, время открытия-закрытия секторного затвора принимали
равным нулю. Cкpипaч(224 знак., 28.09.2023 17:22)
- У меня позиционирование трехкоординатной подвижки. За как можно
меньшее время. Eddy_Em(210 знак., 28.09.2023 17:29, ссылка)
- векторные привода управляются при помощи обычного регулятора и нормированной обратной связи по положению задвижки. если у тебя привод без неё, то тебе придётся делать её математически. LordN(27 знак., 28.09.2023 18:35)
- А у меня было двенадцать дозаторов. Плюс система конвейеров,
бункера, над ними, смесители и отгрузка в автомобили, внизу. До
боли похоже :) - Cкpипaч(1 знак., 28.09.2023 17:40, ссылка)
- Круто. Я опасаюсь разрабатывать приборы, которыми меня может раздавить… - Eddy_Em(28.09.2023 18:33)
- У меня позиционирование трехкоординатной подвижки. За как можно
меньшее время. Eddy_Em(210 знак., 28.09.2023 17:29, ссылка)
- Да кто его знает. Хочу плавно (без рывков, как при трапециевидном
рампе) разгонять и тормозить двигатель. Eddy_Em(580 знак., 28.09.2023 17:17)
- А просто брать упреждение БИХ-фильтром, разве не достаточно? - Cкpипaч(28.09.2023 17:08)
- когда я слышу словосочетание "разностный пид" мне всегда хочется
блевать LordN(95 знак., 28.09.2023 18:31)
- Как старому другу.... - Cкpипaч(1 знак., 28.09.2023 16:50, ссылка)
- ну хуйня жешь никчемушная, рази что только для затравки годится. LordN(35 знак., 28.09.2023 18:28)
- Не помню имя автора, но можно нагуглить формулу. Eddy_Em(308 знак., 28.09.2023 13:08)
- По п.1. гуглить "статическая ошибка П-составляющей регулятора",
остальное - на лекциях очень подробно рассказывали. - Cкpипaч(28.09.2023 12:41)
- двоечником, можно поподробнее - stud23(28.09.2023 12:51,
 )
)
- Гугль это такая поисковая система. Вводишь текст, он дает тебе список страниц, на которых этот текст есть. Можно идти, смотре что написано. Cкpипaч(14 знак., 28.09.2023 12:59)
- двоечником, можно поподробнее - stud23(28.09.2023 12:51,
- Разберись сначала - обратная связь по скорости или по положению? - IBAH(28.09.2023 12:28)
- по скорости - stud23(28.09.2023 12:49, )
- энкодер скорость не измеряет... энкодер выдает импульсы... - IBAH(28.09.2023 13:13)
- энкодер выдает импульсы с определенной частотой, которая запросто
переводится в скорость вращения - stud23(28.09.2023 13:34, )
- энкодер выдает импульсы с определенной частотой, которая запросто
переводится в скорость вращения - stud23(28.09.2023 13:34,
- энкодер скорость не измеряет... энкодер выдает импульсы... - IBAH(28.09.2023 13:13)
- по скорости - stud23(28.09.2023 12:49,
- Делали мы тут сушилку для дерева. Наебались с этими вашими ПИДами
по самые этисамые. Книги и видосики можно не смотреть. Только
руками, глазами и через серрдце в мозг)) - Tpoeшник(04.10.2023 20:27)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}